This lesson introduces the use of mult-threading to achieve uniform acceleration control of 360° servo.
29.1 Introduction to Multithreading
This course introduces the use of multithreading to achieve some effects related to WS2812 LED. Multithreading is a very common operation we use in robot projects, because robots have high requirements for real-time response. When performing a certain task,we try not to block the main thread communication.
Multithreading is similar to executing multiple different programs or tasks at the same time. Multithreading has the following advantages:
1. Use threads to put time-consuming tasks in the background for processing.
2. Improve the operating efficiency of the program. The subsequent real-time video and OpenCV processing video frames use multithreading to greatly increase the frame rate.
3. The encapsulated multithreading task is more convenient to call, similar to the non-blocking control method, that is, the control method of the servo is encapsulated by multithreading.
We use Python's threading library to provide thread-related work. A thread is the smallest unit of work in an application. The current version of Python does not yet provide multithreading priority, thread groups, and threads cannot be stopped, suspended, resumed, or interrupted.
29.2 Preparation
You need to prepare the assembled Classic Car robot, and make sure that the robot has been connected to the 360°servo.
29.3 Realizing uniform acceleration control of 360° servo with multithreading
29.3.1 Code program for multithreading control of 360° servo
Here we use Subline IDE to view and edit the code program of this lesson, please see the content of lesson 2 for specific methods. The specific code and comments are as follows:
In the file manager of the MobaXterm terminal, find the directory:
adeept_alter/server
And open the code of this lesson: 360servo.py.
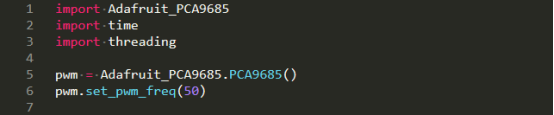
Import the library Adafruit_PCA9685 that controls the servo and instantiate the object used to control the PWM. Set the frequency of the PWM signal to 50.
ID used to pause the thread.

Set commandInput ='no', moveSpeed = 100.

If command =='forward', then control the robot to move forward.

If command =='backward', then control the robot to move backward.

If command =='left', then control the robot to turn to left.

If command =='right', then control the robot to turn to right.

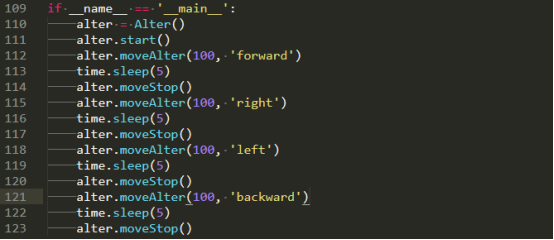
Start the robot; then control the robot forward at a speed of 100, and stop after 5s; again control the robot to turn to right at a speed of 100, and stop after 5s; control the robot to turn to left at a speed of 100 again, and stop after 5s and stop; control the robot backward again at a speed of 100, and stop after 5s.
29.3.2 Run the code program of multithreading control of 360° servo
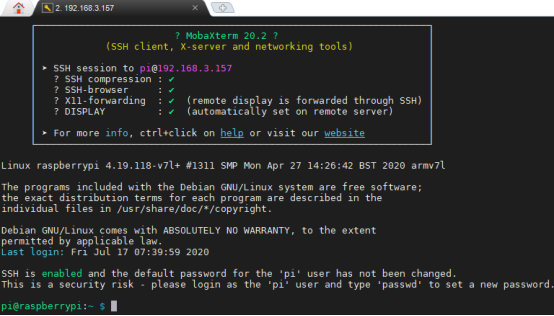
1. Open the terminal software MobaXterm:

2. Log in to your Raspberry Pi (the way to log in to Raspberry Pi has been introduced in Lesson 1):
3. Enter the Course Code folder, this folder stores the sample code program to control the robot, enter the following command:
cd adeept_alter/server

4. Enter the command to display the contents of the current directory:
ls

5. When using the 360°Servo module, we need to install the Python dependency library needed to control 360°Servo: Adafruit_PCA9685, enter the following command in the console of the command window:
sudo pip3 install adafruit-pca9685

6.360servo.py is the sample code of this lesson, enter the command to run this program:
sudo python3 360servo.py

7.After successfully running the program, the Classic Car robot will accelerate uniformly.