 USD
USD EUR
EUR GBP
GBP CAD
CAD AUD
AUD HKD
HKD JPY
JPY KRW
KRW












Your position: Home > All Products
- Adeept Spider Robots

-
 $ 99.99Quantity: 1
$ 99.99Quantity: 1 -
 $ 89.99Quantity: 1
$ 89.99Quantity: 1 -
 $ 114.99Quantity: 1
$ 114.99Quantity: 1
The select 0 products
$104.99
- Description
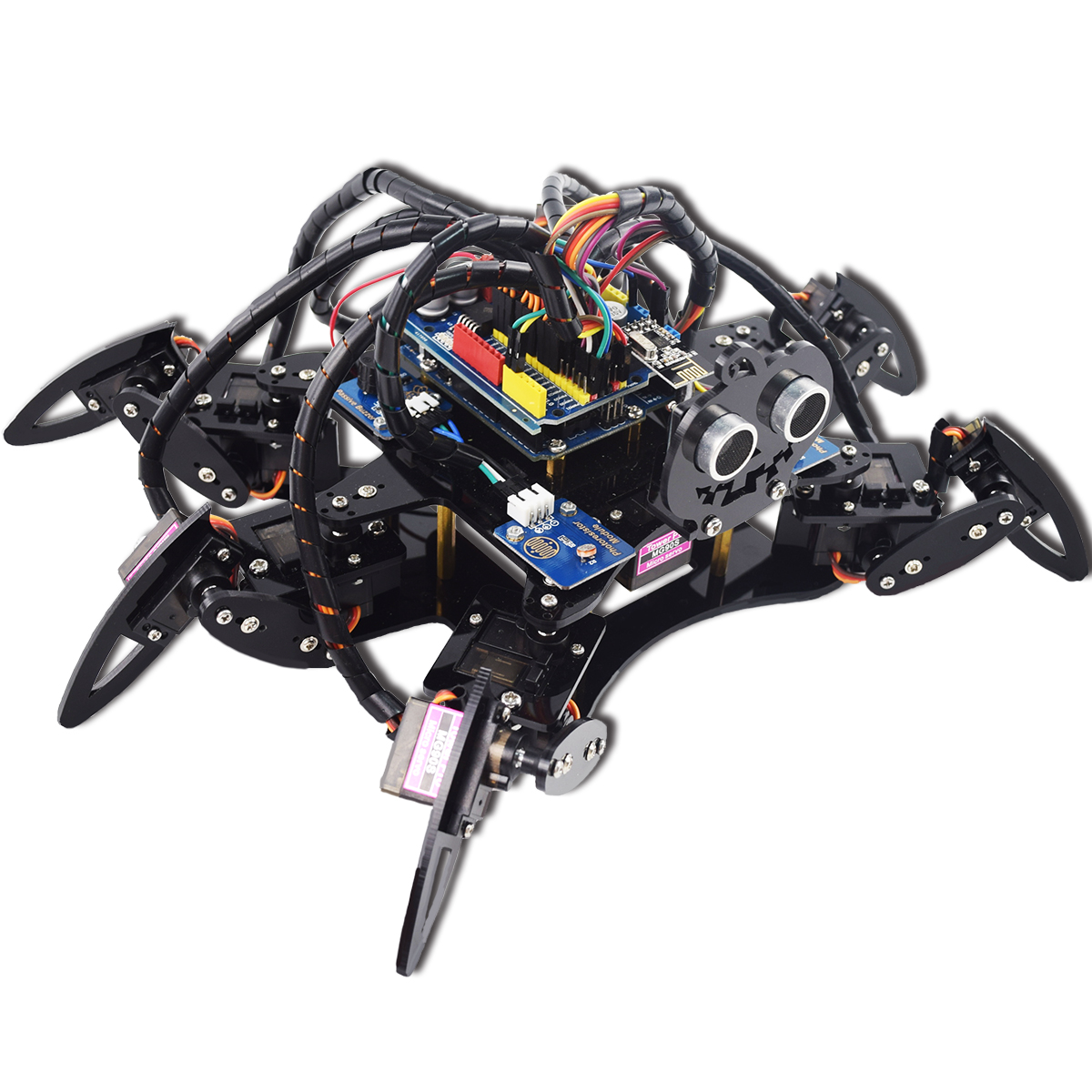

Developed based on Arduino, this 6 Legs spider robot simulates the movements of 6-leg insects via programming in the Arduino IDE and controlling 19 servos.
Hexapod robot, or spider robot, is one type of multi-legged robots. The design of this robot is derived from insects in nature, especially principles of their movement.
In this robot kit, a complete set of hardware devices are provided as well as example code for your learning. You can also write the code for control by yourself. By programming the robot, you can control each leg and even each joint, and truly feel the thrill and joy of learning and making.
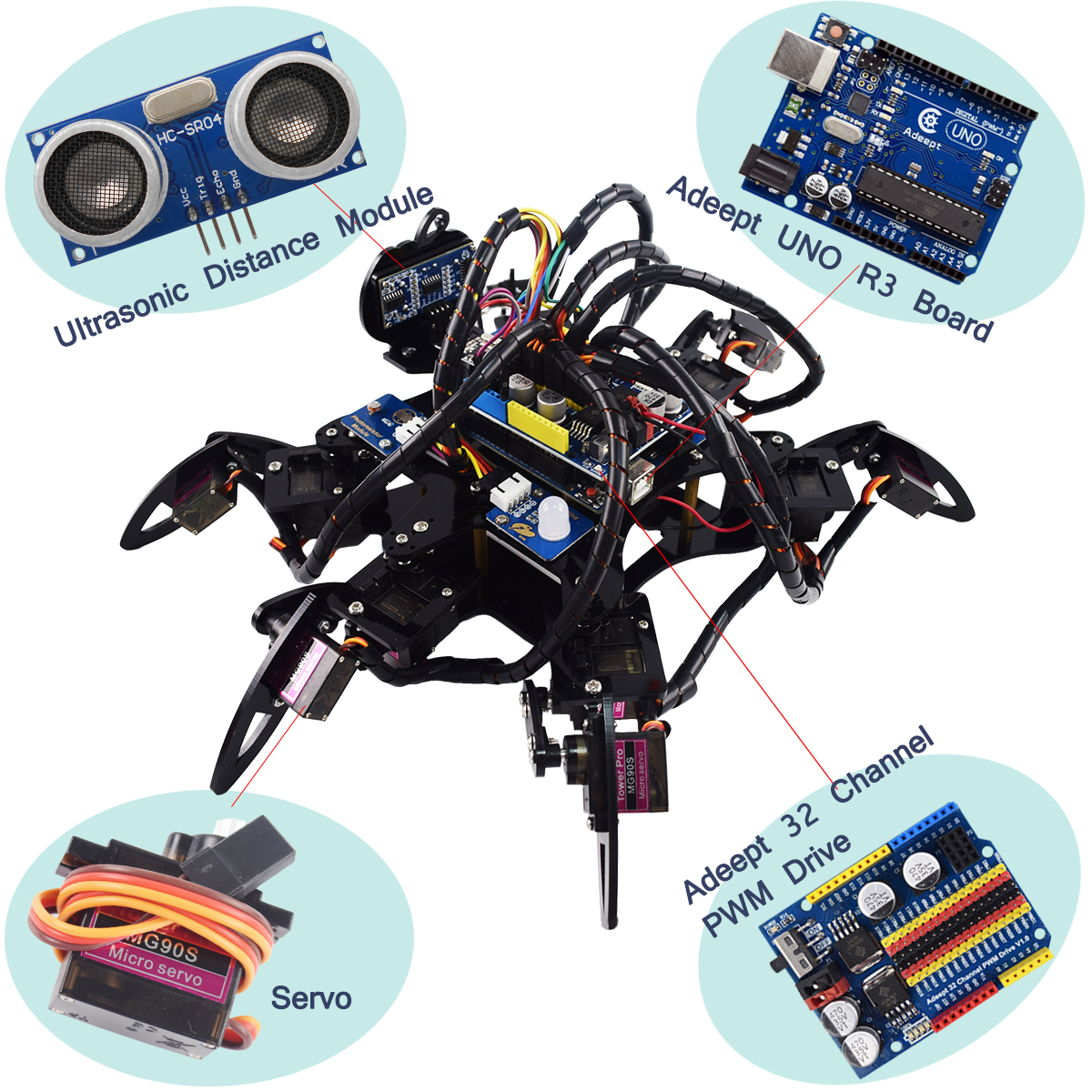
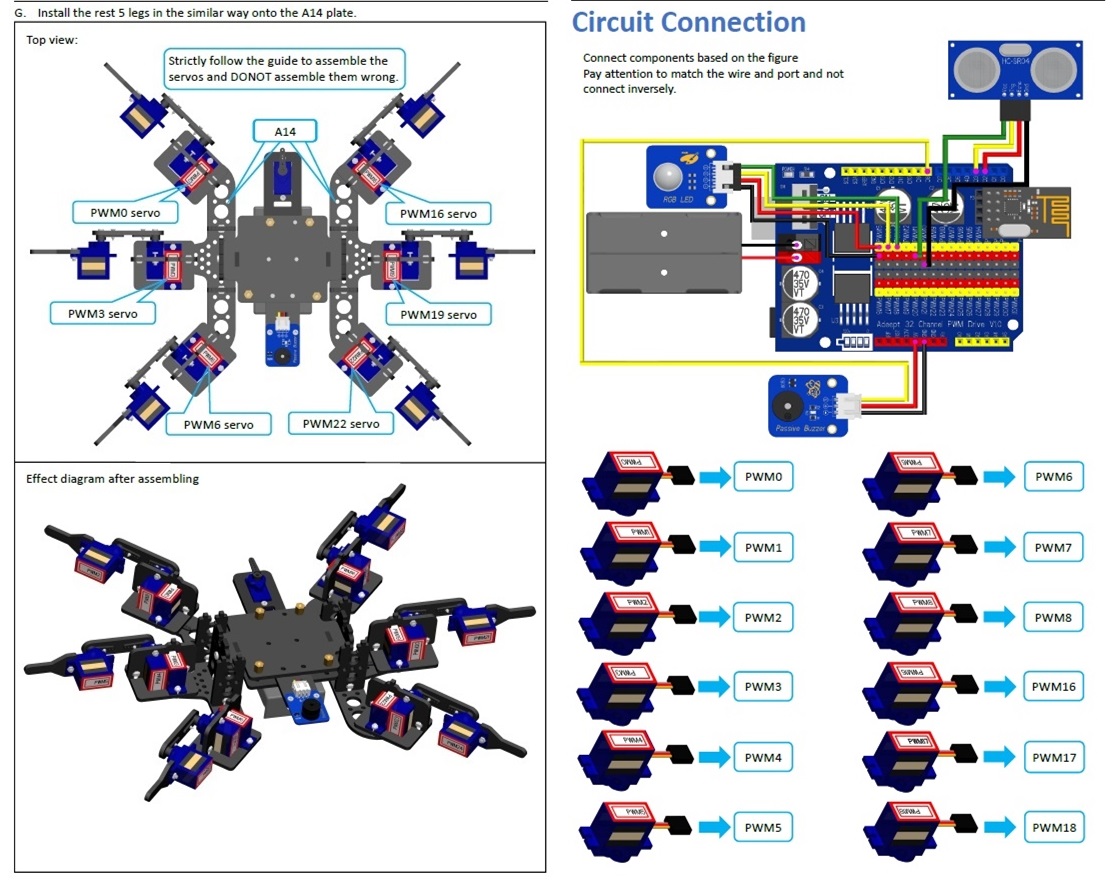
The Adeept Arduino UNO R3 board is used as the core control board for this kit, and an Adeept 32 Channel PWM Driver board for control of 19 servos onside.
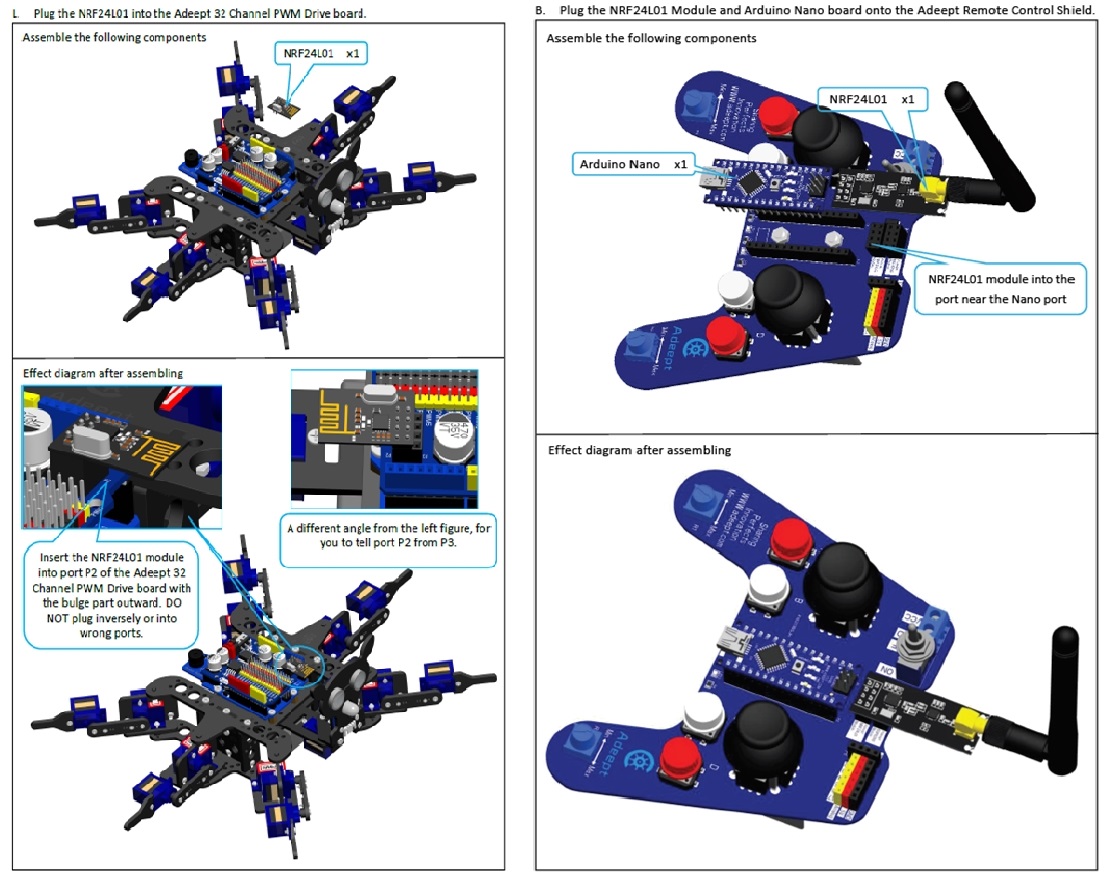
After assembly, you can see 2 parts, the hexapod robot and a remote control. They communicate through NRF24L01 2.4G wireless communication module on each.
Download the tutorials from this link:
http://www.adeept.com/learn/details/id/5
Features:
1,The 6-Legs Spider Robot kit is designed based on Arduino UNO R3 and Nano. This is a complete and fun Arduino/Robot
learning kit. We carefully prepared a detailed guidebook/tutorial(PDF), the guidebook contains complete circuit
diagrams and assembly steps, according to our tutorial, you will be able to easily build your own Spider Robot.
2,The entire system is divided into two parts, the Spider Robot and the remote control, the communication between them
based on NRF24L01 2.4G wireless module.
3,Adeept Arduino UNO R3 and Nano are included.
4,Quick-responding technical support for free.
5,Working Voltage: DC 7V~12V, Powered by four 18650 rechargeable lithium batteries.(This kit does not contain
batteries and you need to prepare yourself)
Package List:
1 Set Acrylic Plates
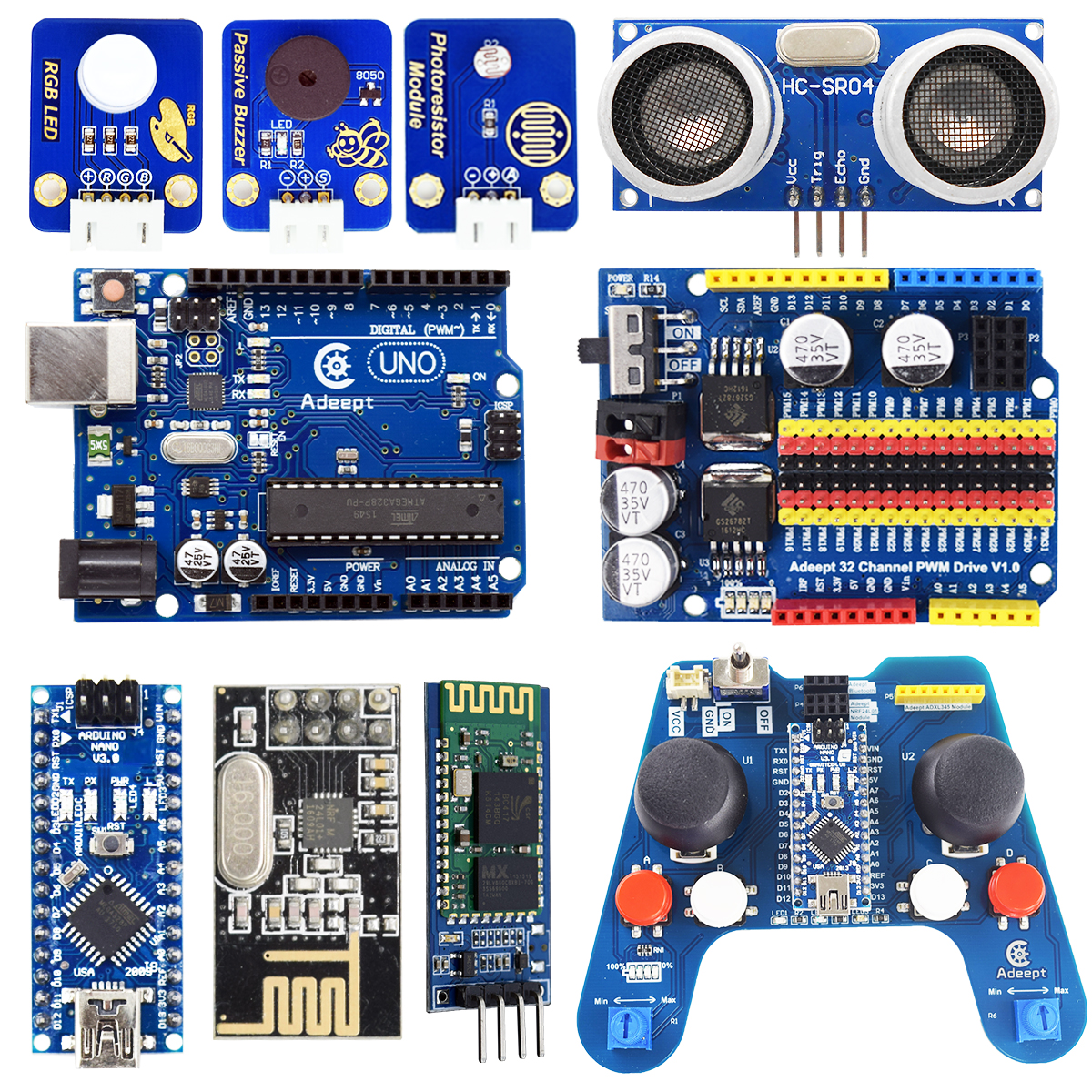
1x Adeept Arduino UNO R3
1x Adeept Arduino Nano
1x Adeept PCA9685-Based 32-Channel PWM Servo Driver
1x Adeept Remote Control Board
1x NRF24L01 2.4G Wireless Transmission Module
1x NRF24L01 2.4G Wireless Transmission Module with PA and Antenna
20x Servo(AD002)
1x Ultrasonic Module
1x RGB LED Module
1x Passive Buzzer Module
2x 18650x2 Battery Holder
1x 3-Pin Wire
10x Male to Female Wire
10x Female to Female Wire
1x Large Cross Screwdriver
1x Slotted Screwdriver
1x Cross Screwdriver
1x Cross Socket Wrench
1x USB Cable
1x Mini USB Cable
1x Wingding Pipe
1x Ribbon
1x Rubber Sleeve
40x M2 Nut
44x M3 Nut
6x M1.4*6 Self-tapping Screw
6x M3*10 Countersunk Head Screw
50x M2*8 Screw
4x M2*10 Screw
8x M3*5 Screw
34x M3*8 Screw
2x M3*14 Screw
4x M3*30 Screw
6x M3*6 Copper Standoff
You May Like
, Color Tracking, OLED Display, Video Transmission")
-
$99.99
, Smart Car with 4-DOF Robotic Arm for Pi 5/4/3, 1080P HD Camera, OpenCV, OLED")
-
$164.99
-
$114.99
-
$89.99

-
$89.99

-
$94.99
, STEM Projects Kit, Robotics & Engineering Kit, Programming Set")
-
$79.99

-
$169.99

-
$44.99
Recent Reviews
- ByVladislav
 Junior Member
Junior Member- Nov 13, 2019
Please delete my bad comment from your site - I've been a fan of you for a long time and now I'm ashamed of what I wrote. I was very angry that the new servos were not the same as the old ones. Now I have no doubt that the new servos are of a sufficiently high quality as everything manufactured by Adeept. Again, I apologize for offending the team, which made me realize that Arduino is much more than just flashing LEDs with different sensors. In one year, this Hexapod made Arduino my favorite hobby.
- ByNew Hexapod with MG90S or SG92R?
- Junior Member
- Nov 05, 2019
I already have one Hexapod and am very pleased with it. Now I want to buy another hexapod ( Item Code: ADA022 - Adeept Hexapod 6 Legs Spider Robot Kit for Arduino). The one I have is with MG90S servomotors. My question is if I buy another one whether it will be with the same MG90S motors. Because it says on your site right now that you are offering it with SG92R servomotors that are of lower quality than the MG90S. I want another one, but with the same MG90S motors to be interchangeable.
Greetings,
Vladislav
Greetings,
Vladislav
Product reviews can be carried out after the member login, please click here to login
See all 17 Customer Reviews


















