Lesson 2 Introduction of Robot HAT
2.1 Robot HAT
When you get the robot product, you will see a board with its name printed onside: Adeept Robot HAT, which is an important part of the robot. There are many interfaces on the Robot HAT. You can connect sensors and electronic hardware modules to the board by those interfaces to realize more functions. This robot works on the Raspberry Pi. Let's first get to know the Robot HAT.
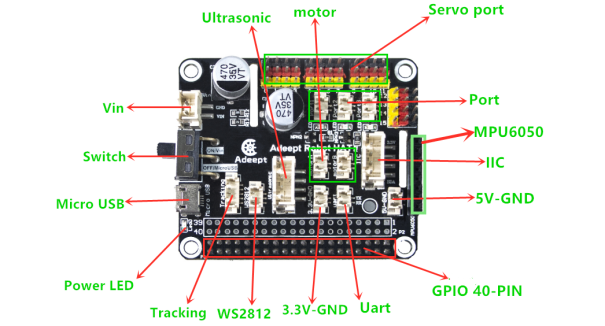
[Vin]: The vin interface is an interface for external power supply.
[Switch]: Switch is to turn the Robot HAT ON/OFF.
[Micro USB]: The Micro USB interface can connect the Robot HAT to a computer or other device, and can also supply power for the Robot.
[Power LED]: Power LED is used to indicate the power status of Robot HAT. If the LED is on, it means that the Robot HAT is powered on and can run; otherwise, the Robot HAT is off.
[Tracking]: The pin interface of Tracking Module.
[WS2812]: The pin interface of WS2812 Module.
[3.3V-GND]: 3.3V power supply interface.
[Uart]: Uart interface.
[GPIO 40-PIN]: General Purpose Input Output (GPIO) is designed as a slot with two rows of pins on the Robot HAT. GPIO can be used to connect various peripheral electronic devices and sensors and control or monitor these devices with input/output level signals. In robot products, this GPIO interface is connected to the GPIO pins on the Raspberry Pi.
[5V-GND]: 5V power supply interface.
[IIC]: IIC interface. It is also the interface of the OLED screen module.
[MPU6050]: The interface of MPU6050 sensor.
[Port]: Divided into Port 1, Port 2, and Port 3 interfaces, which are commonly used to connect small LED lights.
[Servo port]: Servo interface.
[motor]: Divided into motor 1 and motor 2 interfaces.
[Ultrasonic]: Ultrasonic interface.
2.2 Precautions for Using the Robot HAT
When you are performing software installation, structural assembly or program debugging, you can use a USB cable to power the Raspberry Pi. If the Raspberry Pi is equipped with Robot HAT, you can connect the USB cable to the USB port on the Robot HAT. Robot HAT will power the Raspberry Pi by the GPIO interface.
Different Raspberry Pi models have specific requirements for current. For example, the Raspberry Pi 3B needs at least 2A to boot up, yet the Raspberry Pi 4 needs 3A to boot normally. When you use the power adapter to power the Raspberry Pi, you can check the specifications on your power adapter.
When Robot HAT is connected to a load, such as a motor or a few servos, a high-current power supply is required to connect to Vin on the Robot HAT. You can use two high-current 18650 batterie for power supply. The Adeept robot provides a dual 18650 battery box with a 2-pin interface for you to supply power to the Robot HAT.
When USB port on the Robot HAT is used as power supply, the switch of Robot HAT does not control whether to power on or off, but only controls the power supply by Vin onside.
Do not use both the USB port and Vin on the Robot HAT to supply power at the same time. If you need to debug the program for a long time and don’t want to remove the battery, you can set the switch on the Robot HAT to OFF, so that when you connect the Robot HAT with a USB cable, Robot HAT is powered by USB.
If your robot reboots automatically after booting, or disconnects and reboots at the moment it starts to move after normal booting, it is likely that your power supply does not provide enough current as the robot automatically runs the program to control all servos to rotate to the center position when booting – it then drops the voltage on the Raspberry Pi and causes a reboot.
We've tested when powering with 7.4V, the peak current of the robot would be around 3.75A, which means you need to connect batteries with a 4A output.
You may also power the Robot HAT with high energy li-ion battery; Robot HAT can be supplied by a power source under 15V.
When assembling the servo rocker arm, you can use a USB cable to power the Robot HAT. After the Raspberry Pi with the robot software is installed, it will control the Robot HAT to set all the servo ports to output a signal of rotating to the center position. You can connect the servo to any port. The servo shaft will rotate to the center position, and then you can install the servo rocker arm at the specified angle. After the rocker arm is assembled, you can disconnect the servo from the Robot HAT. To connect the rocker arm for another servo, just wire the servo to any servo port on the Robot HAT.