About RaspArm-S Robotic Arm
RaspArm-S is an open source robotic arm product which is based on the Raspberry Pi. It has a simple structure and a smooth learning curve. At the same time, this product provides 26 supporting courses (the course will be followed by higher-level function updates). From the beginning of getting the Raspberry Pi, everyone has to learn advanced knowledge and skills step by step, and understand how to use the Python language for rapid Maker hardware product development.
We provide a variety of control methods for RaspArm-S. You can not only use Web applications to control RaspArm-S on your mobile phone, but remotely control RaspArm-Son another computer. And because all the Raspberry Pi interfaces on the RaspArm-S are exposed, you can also connect the mouse, keyboard and monitor to the RaspArm-S to directly control it.
Regarding the control of RaspArm-S, we use the inverse connection method to control the servo, which is different from the control method that depends on inputting the angle of the servo. This control method only needs to input the position of the end point to control the execution of the robotic arm. For example, if we want to hold something, we only need to consider where we should put our hands. There is no need to consider that how many degrees each joint rotates.
As an open source hardware product, we pay special attention to the secondary development potential of RaspArm-S. We also provide detailed API calling methods. If you want to build your own project, you can directly call the existing API to control RaspArm-S at the code level, for this can greatly improve development efficiency.
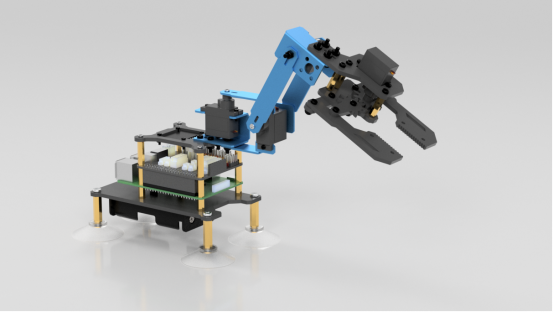
In order to obtain a reliable and stable structure, we have reduced the mechanical complexity of the product as much as possible, while maintaining the scalability of the product. For example, you can change the gripper to a pen, and then set or rewrite a variable in a program with the GUI. The function of the end servo will change from controlling the gripper to keeping the pen at a certain angle. The chuck is a relatively complicated part of the structure. We use a linkage mechanism to increase the strength of the chuck.
There are drawings of the robotic arm in our document, including dimensions and assembly hole specifications, which is convenient for users to use the robotic arm in more occasions.The robotic arm itself is also a modular design, so users can flexibly assemble it into the form they need.
RaspArm-S is equipped with an OLED screen to display key information. When you are debugging or running the robotic arm on the desktop, you can use the micro USB interface on the driver board to power the RaspArm-S. No extra battery is required. This avoids the trouble of charging the product during the development process. The advantages of permanent power and simple structure enable you to focus on product development without any worries and realize your creative ideas more efficiently.