You can use the RaspArm-S manipulator as an extension module of other robots and install it on the robot. For example, you can install it on the Alter Dog product developed and designed by us:

We open sourced the key assembly dimension parameters of this robotic arm, as shown in "Dimensional Drawing.pdf".
This assembly size is also a commonly used size for the steering wheel of a digital servo. You can expand it appropriately according to your needs.
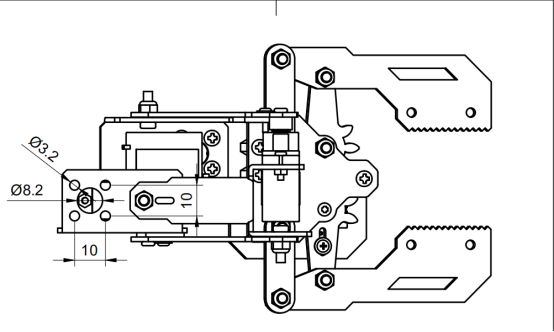
The robot arm can be fixed directly with M3x10 screws and M3 nuts, or it can be fixed with copper pillars.
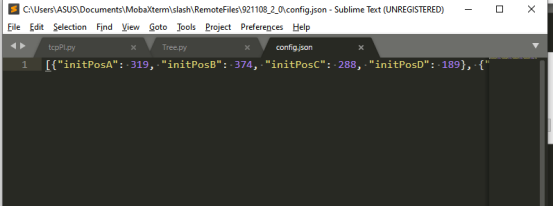
After the robotic arm is installed, please refer to the content of lesson 15 for the related API call method of controlling the robotic arm. If you change the servo connection port, you need to modify the course sample code config.json provided by us. The method of modifying the code program in the Raspberry Pi is as follows:to view and edit our code program on the MobaXterm terminal software, we provide two methods for reference.
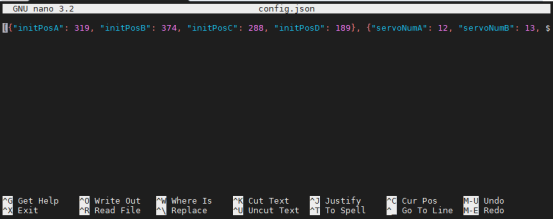
(1) The first is to use Linux commands. For example, if you need to view and modify the code program config.json of this lesson, then you can log in to the Raspberry Pi with the MobaXterm terminal and enter the following command in the command window (Raspberry Pi console) :
sudo nano adeept_rasparms/server/config.json

After opening the code file, you need to find this line of code:
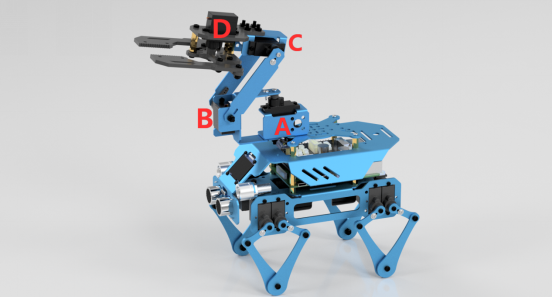
Among them, 12, 13, 14, and 15 are the default servo interface numbers of our course examples. You need to modify them according to your actual situation. The structure diagram of the servo of the robotic arm from bottom to top is as follows:
In this way, you can view and modify our code program. You can modify and edit the code with the direction keys on the keyboard to realize the control function you want. But you need to learn and search about the command operation method of Linux nano.
[Nano commonly used operation commands]:
1. To save the modified program, you need to press the shortcut key Ctrl+O on the keyboard
2. To exit the program code interface, you need to press the shortcut key Ctrl+X on the keyboard
3. To cut a line of code, you can use Ctrl+K
4.To paste the code, you can use Ctrl+U
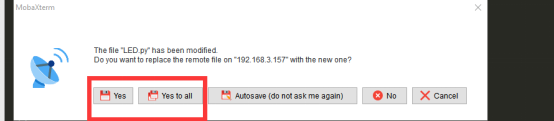
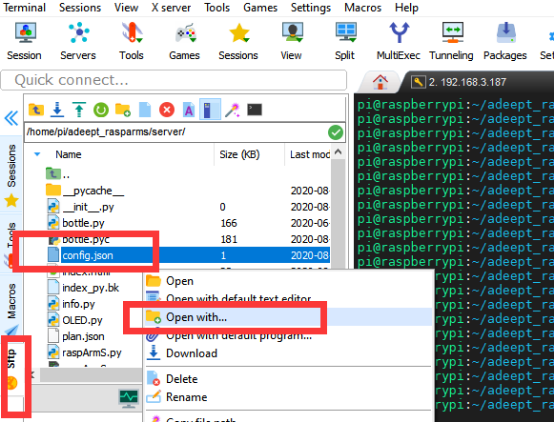
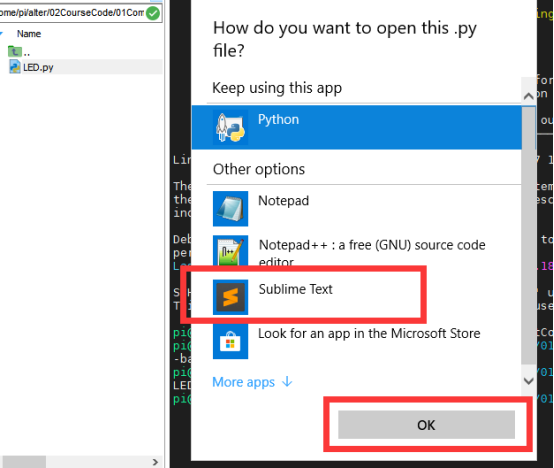
(2) The second method is to use a third-party IDE tool to view and edit the code program of this lesson. You can find the file you want to edit in the file resource management system on the left of MobaXterm, and click the right mouse button on this file. Click Open with, select your IDE, we recommend you to use Sublime Text IDE, you need to download it before you can use: http://www.sublimetext.com/3, so that you can use your favorite IDE to edit the files in the Raspberry Pi. After editing, CTRL+S can save the file.
When you need to save the modified file, you can press the shortcut key CTRL+S, and then select Yes or Yes to all.