Overview
In this lesson, we will learn how to measure the distance by the ultrasonic distance sensor.
Components
- 1 * Arduino UNO
- 1 * USB Cable
- 1 * Ultrasonic Distance Sensor
- 1 * LCD1602
- 1 * 10kΩ Potentiometer
- Several jumper wires
Principle
This recipe uses the popular Parallax PING ultrasonic distance sensor to measure the distance to an object ranging from 2cm to around 3m.
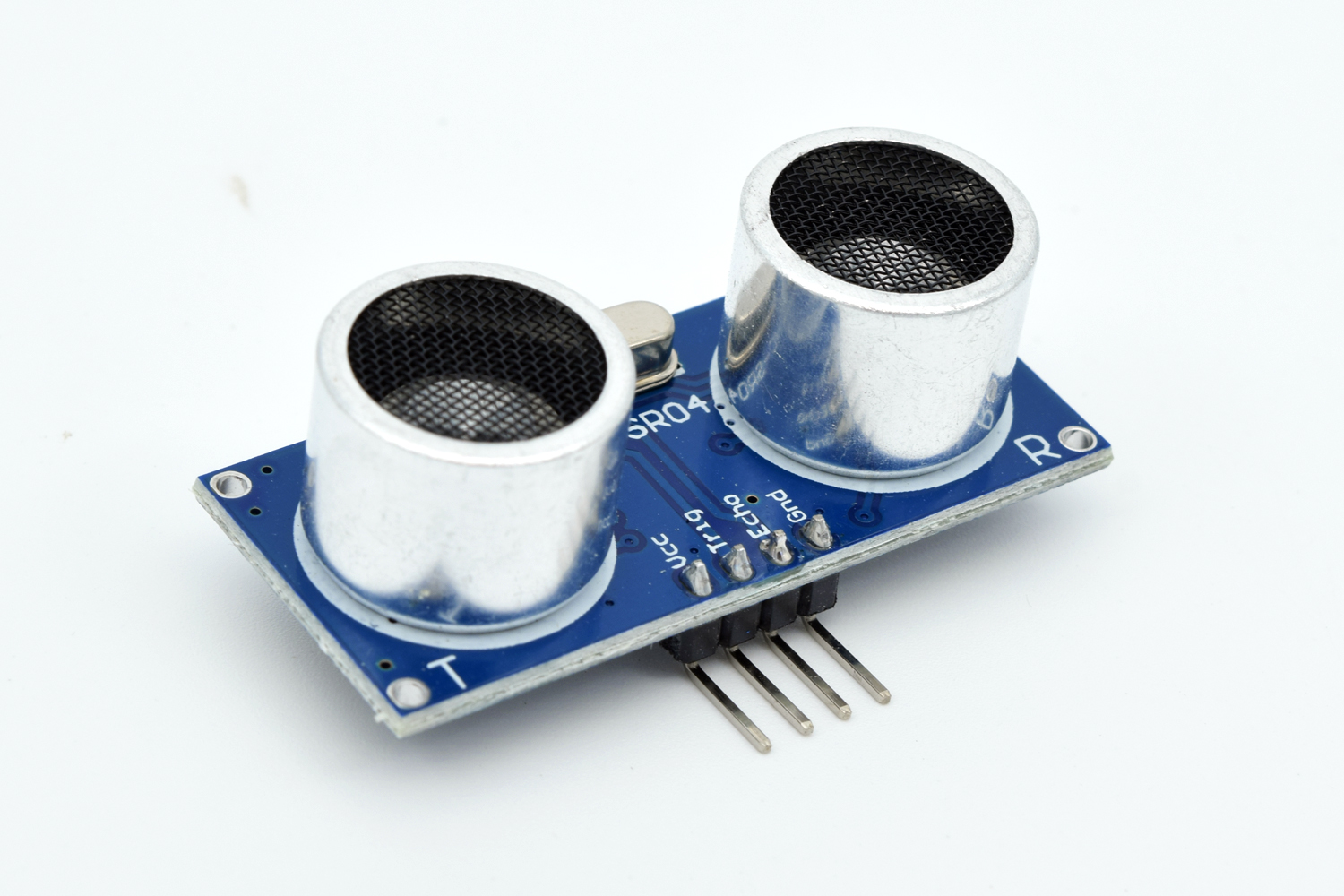
Ultrasonic sensors provide a measurement of the time it takes for sound to bounce off an object and return to the sensor. The “ping” sound pulse is generated when the pingPin level goes HIGH for two micro-seconds. The sensor will then generate a pulse that terminates when the sound returns. The width of the pulse is proportional to the distance the sound traveled and the sketch then uses the pulseIn() function to measure that duration. The speed of sound is 340 meters per second, which is 29 microseconds per centimeter. The formula for the distance of the round trip is:
RoundTrip = microseconds / 29.
So, the formula for the one-way distance in centimeters is:
microseconds / 29 / 2
Procedures
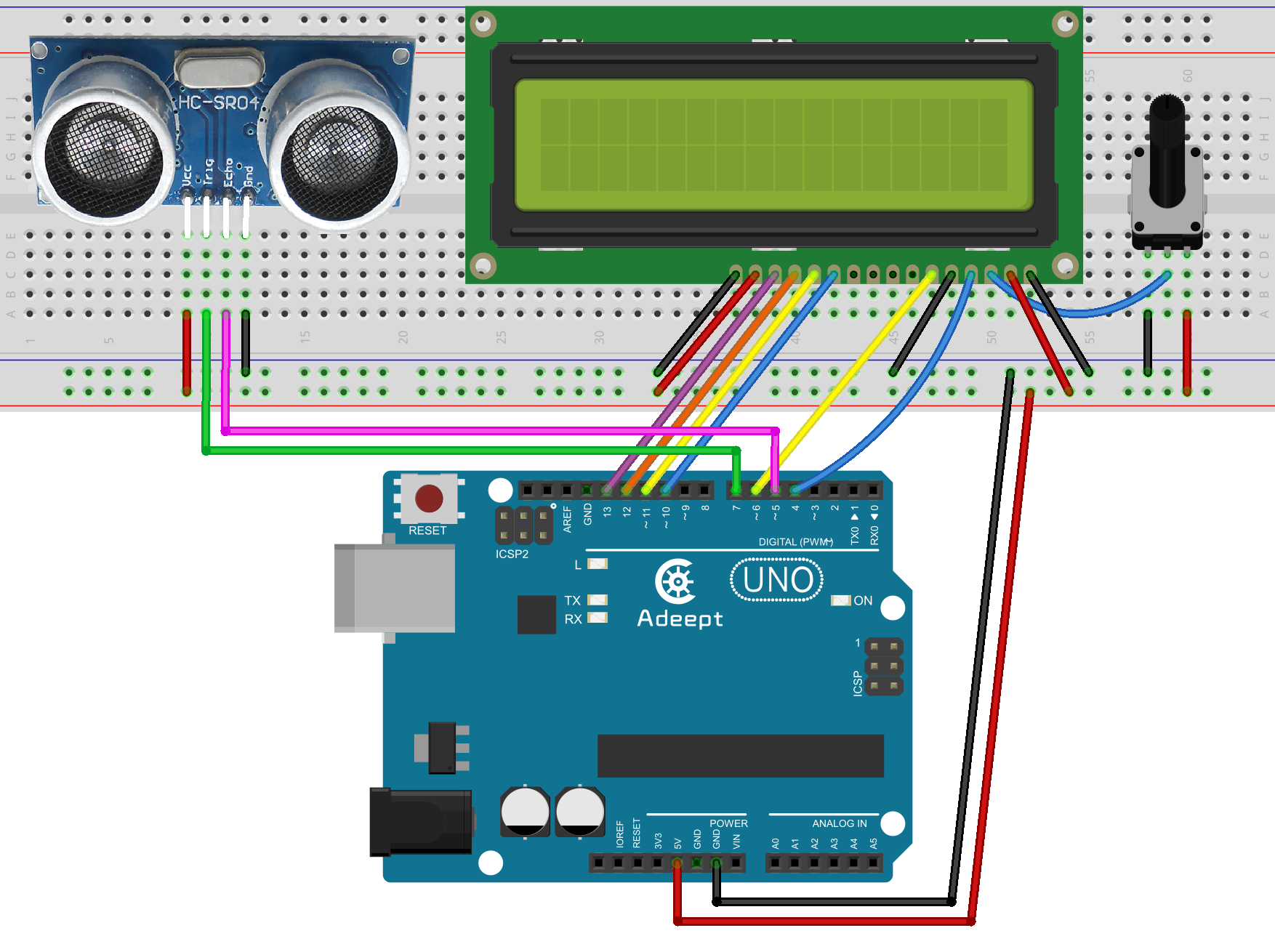
Step 1: Build the circuit
Step 2: Program
![]() _19_ultrasonicDistanceSensor.ino
_19_ultrasonicDistanceSensor.ino
/***********************************************************
File name: 19_ultrasonicDistanceSensor.ino
Description: When you move the ultrasonic distance sensor,
you will find LCD1602 display distance.
Website: www.adeept.com
E-mail: support@adeept.com
Author: Tom
Date: 2015/05/02
***********************************************************/
#include <LiquidCrystal.h>
const int pingPin = 5; // pin connected to Echo Pin in the ultrasonic distance sensor
const int trigPin = 7; // pin connected to trig Pin in the ultrasonic distance sensor
LiquidCrystal lcd(4, 6, 10, 11, 12, 13);
void setup()
{
pinMode(pingPin, INPUT); //Set the connection pin output mode Echo pin
pinMode(trigPin, OUTPUT);//Set the connection pin output mode trog pin
lcd.begin(16, 2); //set up the LCD's number of columns and rows:
lcd.clear(); //Clears the LCD screen and positions the cursor in the upper-left corner
delay(1000); //delay 1000ms
}
void loop()
{
int cm = ping(pingPin) ;
lcd.setCursor(0, 0); // set the cursor to column 0, line 0
lcd.print(" adeept ");// Print a message of "Temp: "to the LCD.
lcd.setCursor(0, 1); // set the cursor to column 0, line 0
lcd.print("distance: "); // Print a message of "Temp: "to the LCD.
lcd.print(cm); // Print a centigrade temperature to the LCD.
lcd.print(" cm "); // Print the unit of the centigrade temperature to the LCD.
delay(500);
}
int ping(int pingPin)
{
// establish variables for duration of the ping,
// and the distance result in inches and centimeters:
long duration, cm;
// The PING))) is triggered by a HIGH pulse of 2 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
pinMode(trigPin, OUTPUT);
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(5);
digitalWrite(trigPin, LOW);
pinMode(pingPin, INPUT);
duration = pulseIn(pingPin, HIGH);
// convert the time into a distance
cm = microsecondsToCentimeters(duration);
return cm ;
}
long microsecondsToCentimeters(long microseconds)
{
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the
// object we take half of the distance travelled.
return microseconds / 29 / 2;
}Step 3: Compile the program and upload to Arduino UNO board
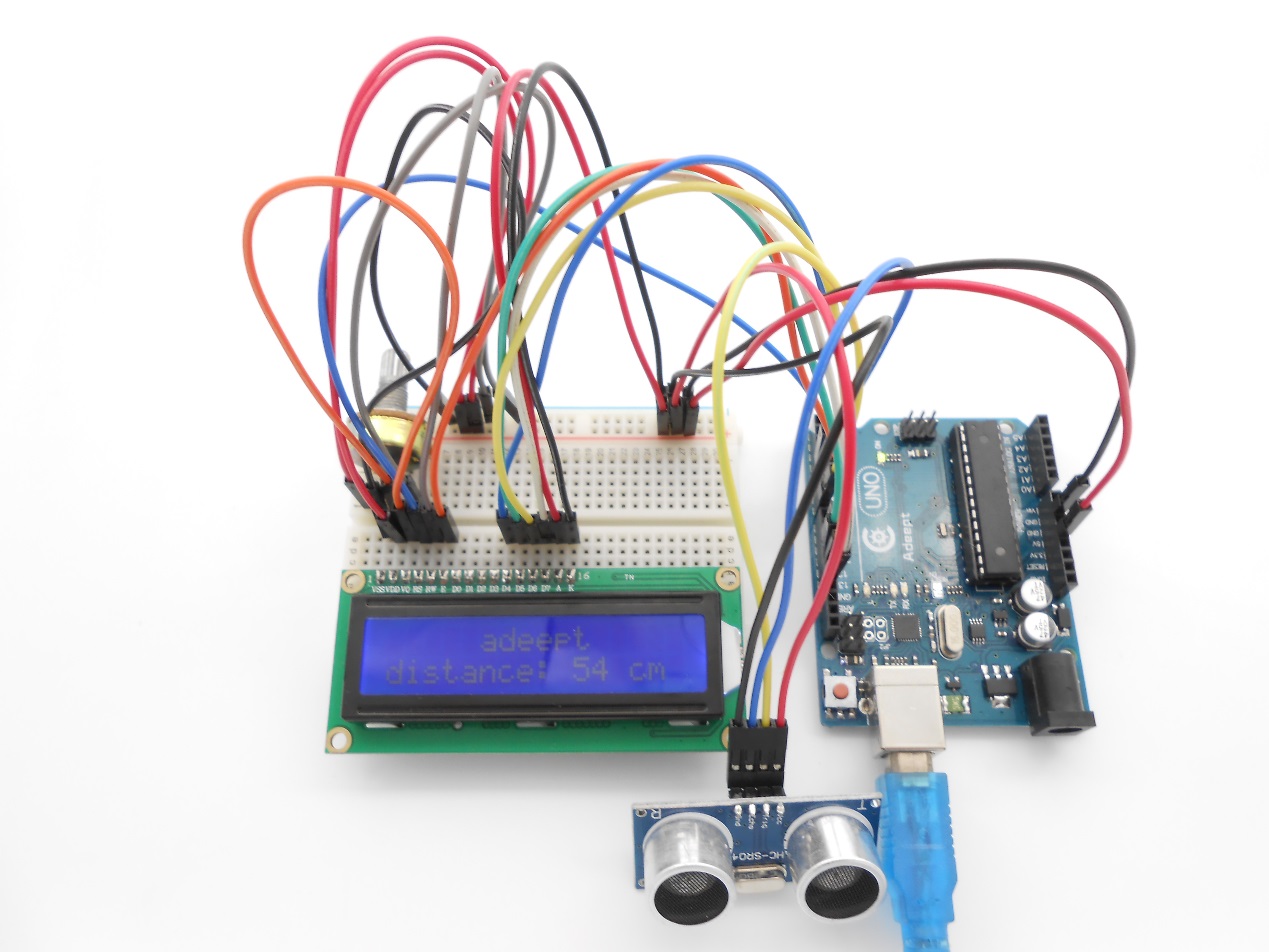
Now, change the distance between the ultrasonic module and the obstacle, and you will find the distance value displayed on the LCD1602 changed.