Overview
In this lesson, we will learn how to control a stepper motor by a remote controller.
Components
- 1 * Arduino UNO
- 1 * USB Cable
- 1 * IR Receiver HX1838
- 1 * Remote Controller
- 1 * Stepper Motor
- 1 * ULN2003 Driver Board
- 1 * Breadboard
- Several jumper wires
Principle
If you press a certain key on the remote controller, the corresponding signal will be sent to the Arduino UNO, and then the Arduino can tell the stepper motor how many steps it needs to run in which direction. For example, when you press the key ‘+’, the stepper motor will run clockwise; press the key ‘-’, the motor will run counterclockwise; press the key ‘2’, it will rotate two laps; press the key ‘5’, it will rotate five laps.
Procedures
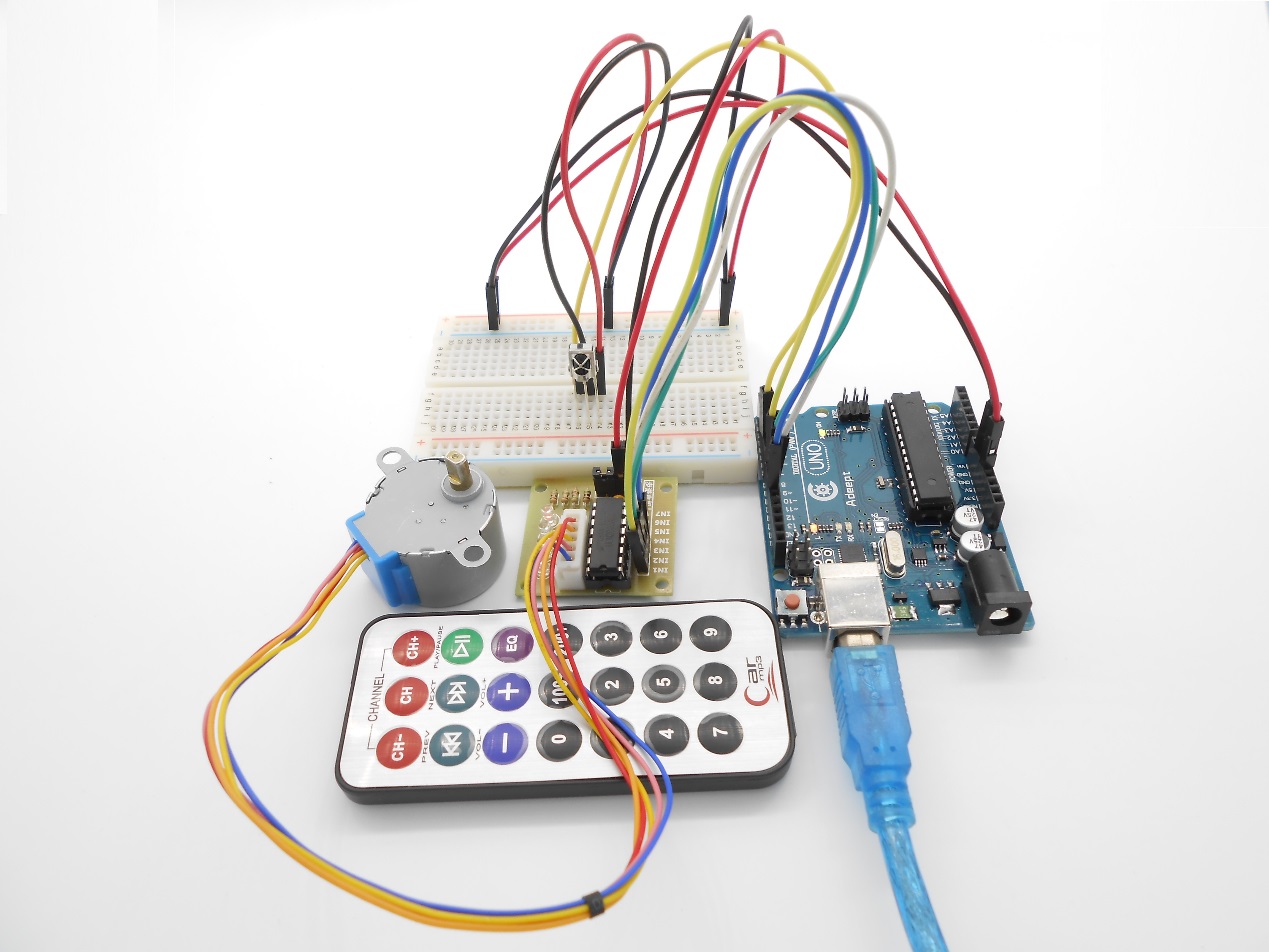
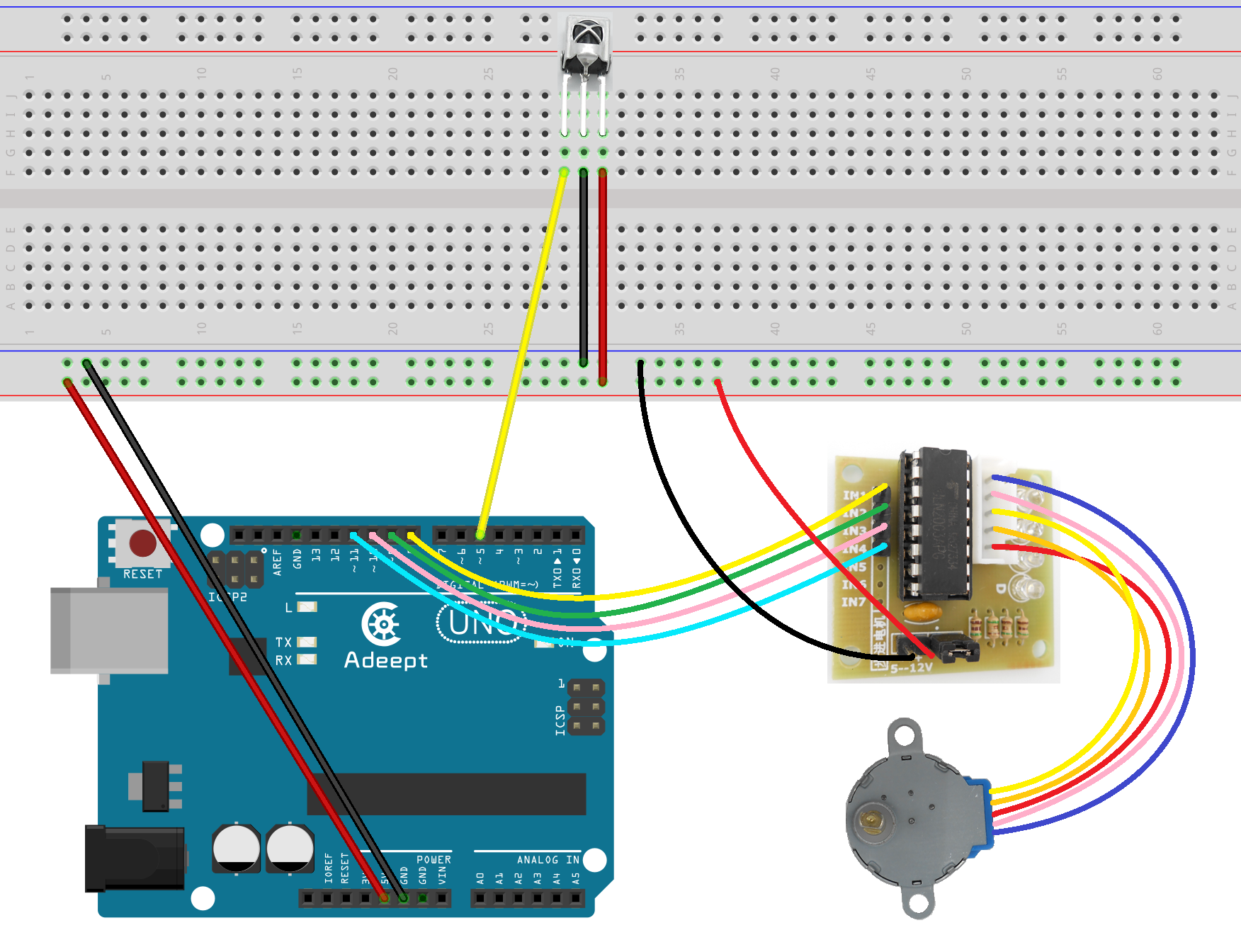
Step 1: Build the circuit
Step 2: Program
![]() _33_control_a_stepper_motor_with_IR_remoter_controller.ino
_33_control_a_stepper_motor_with_IR_remoter_controller.ino
/***********************************************************
File name: 33_control_a_stepper_motor_with_IR_remoter_controller.ino
Description: when you press the ‘0’ to ‘9’ buttons on the
remote control, you will see the stepper motor
to rotate. When you press the '+' and '-' buttons
on the remote control, you can control the stepper
motor to be forward or reverse.
Website: www.adeept.com
E-mail: support@adeept.com
Author: Tom
Date: 2015/05/02
***********************************************************/
#include <IRremote.h>
int RECV_PIN = 5;//The definition of the infrared receiver pin 5
int Pin0 = 8;//definition digital 8 pins as pin to control the IN1 (ULN24L01)
int Pin1 = 9;//definition digital 9 pins as pin to control the IN2 (ULN24L01)
int Pin2 = 10;//definition digital 10 pins as pin to control the IN3 (ULN24L01)
int Pin3 = 11;//definition digital 11 pins as pin to control the IN4 (ULN24L01)
int _step = 512;
int _speed = 1;
IRrecv irrecv(RECV_PIN);
decode_results results;
int dir;
void setup()
{
pinMode(Pin0, OUTPUT);//Set digital 8 port mode, the OUTPUT for the output
pinMode(Pin1, OUTPUT);//Set digital 9 port mode, the OUTPUT for the output
pinMode(Pin2, OUTPUT);//Set digital 10 port mode, the OUTPUT for the output
pinMode(Pin3, OUTPUT);//Set digital 11 port mode, the OUTPUT for the output
irrecv.enableIRIn(); //Initialization infrared receiver
}
void loop()
{
if (irrecv.decode(&results)) {
switch(results.value){
case 0xF076C13B/*-*/:
dir = 1;
break;
case 0xA3C8EDDB/*+*/:
dir = 0;
break;
case 0xC101E57B/*0*/:
Speed(15); //Stepper motor speed = 1 slow (note:speed from 1 to 15)
Step(0); //Stepper motor stop
break;
case 0x9716BE3F/*1*/:
Speed(15);//Stepper motor speed = 15 fast (note:speed from 1 to 15)
if(dir==0){
Step(512);//Stepper motor forward 512 steps ---- 360 angle
}else{
Step(-512);//Stepper motor backward 512 steps ---- 360 angle
}
break;
case 0x3D9AE3F7/*2*/:
Speed(15);//Stepper motor speed = 15 fast (note:speed from 1 to 15)
if(dir==0){
Step(1024);//Stepper motor forward 1024 steps ---- 2*360 angle
}else{
Step(-1024);//Stepper motor backward 1024 steps ---- 2*360 angle
}
break;
case 0x6182021B/*3*/:
Speed(15);//Stepper motor speed = 15 fast (note:speed from 1 to 15)
if(dir==0){
Step(1536);//Stepper motor forward 1536 steps ---- 3*360 angle
}else{
Step(-1536);//Stepper motor backward 1536 steps ---- 3*360 angle
}
break;
case 0x8C22657B/*4*/:
Speed(15);//Stepper motor speed = 15 fast (note:speed from 1 to 15)
if(dir==0){
Step(2048);//Stepper motor forward 2048 steps ---- 4*360 angle
}else{
Step(-2048);//Stepper motor backward 2048 steps ---- 4*360 angle
}
break;
case 0x488F3CBB/*5*/:
Speed(15);//Stepper motor speed = 15 fast (note:speed from 1 to 15)
if(dir==0){
Step(2560);//Stepper motor forward 2560 steps ---- 5*360 angle
}else{
Step(-2560);//Stepper motor backward 2560 steps ---- 5*360 angle
}
break;
case 0x449E79F/*6*/:
Speed(15);//Stepper motor speed = 15 fast (note:speed from 1 to 15)
if(dir==0){
Step(3072);//Stepper motor forward 3072 steps ---- 6*360 angle
}else{
Step(-3072);//Stepper motor backward 3072 steps ---- 6*360 angle
}
break;
case 0x32C6FDF7/*7*/:
Speed(15);//Stepper motor speed = 15 fast (note:speed from 1 to 15)
if(dir==0){
Step(3584);//Stepper motor forward 3584 steps ---- 7*360 angle
}else{
Step(-3584);//Stepper motor backward 3584 steps ---- 7*360 angle
}
break;
case 0x1BC0157B/*8*/:
Speed(15);//Stepper motor speed = 15 fast (note:speed from 1 to 15)
if(dir){
Step(4096);//Stepper motor forward 4096 steps ---- 8*360 angle
}else{
Step(-4096);//Stepper motor backward 4096 steps ---- 8*360 angle
}
break;
case 0x3EC3FC1B/*9*/:
Speed(15);//Stepper motor speed = 15 fast (note:speed from 1 to 15)
if(dir==0){
Step(4608);//Stepper motor forward 4608 steps ---- 9*360 angle
}else{
Step(-4608);//Stepper motor backward 4608 steps ---- 9*360 angle
}
break;
default :
Step(0); //Stepper motor stop
break;
}
irrecv.resume(); // Receiving the next value
}
}
void Speed(int stepperspeed)//set Stepper speed
{
_speed = 15 - stepperspeed;
if( _speed<1){
_speed = 1;
}
if( _speed>15){
_speed = 15;
}
}
void Step(int _step)//Stepper motor rotation
{
if(_step>=0){ // Stepper motor forward
for(int i=0;i<_step;i++){
setStep(1, 0, 0, 1);
delay(_speed);
setStep(1, 0, 0, 0);
delay(_speed);
setStep(1, 1, 0, 0);
delay(_speed);
setStep(0, 1, 0, 0);
delay(_speed);
setStep(0, 1, 1, 0);
delay(_speed);
setStep(0, 0, 1, 0);
delay(_speed);
setStep(0, 0, 1, 1);
delay(_speed);
setStep(0, 0, 0, 1);
delay(_speed);
}
}else{ // Stepper motor backward
for(int i=_step;i<0;i++){
setStep(0, 0, 0, 1);
delay(_speed);
setStep(0, 0, 1, 1);
delay(_speed);
setStep(0, 0, 1, 0);
delay(_speed);
setStep(0, 1, 1, 0);
delay(_speed);
setStep(0, 1, 0, 0);
delay(_speed);
setStep(1, 1, 0, 0);
delay(_speed);
setStep(1, 0, 0, 0);
delay(_speed);
setStep(1, 0, 0, 1);
delay(_speed);
}
}
}
void setStep(int a, int b, int c, int d)
{
digitalWrite(Pin0, a);
digitalWrite(Pin1, b);
digitalWrite(Pin2, c);
digitalWrite(Pin3, d);
}Step 3: Compile the program and upload to Arduino UNO board